解决方法
首先准备好搭建链轮应用所需要的零件材料,清单如下:
1号B-短结合键*5,2号C-长结合键*2,3号C-轴扣键*2,19号C-3孔圆角长条*2,27号C-11孔长条*1,29号C-15孔超长条*2,31号5*5孔正方框*4,33号5*13孔超长方框*2,34号C-8*12底盘*1,35号C-27mm马达短轴*1,40号C-150mm l轴*1,46号C-10T链轮*1,47号C-30T链轮*1,50号C-轴转接器*3,54号C-链条*38,62号B-表情颗粒-春丽熊*1,63号B-3凹正方颗粒*1,64号B-动物耳朵*1,65号B-动物嘴颗粒*1,66号B-左手颗粒*1,67号B-右手颗粒*1,68号B-双足颗粒*1,70号B-扳手*1,73号C-Arduino主控盒*1,76号C-180度角度伺服马达*1,79号3AA-6颗双层电池盒。如图:

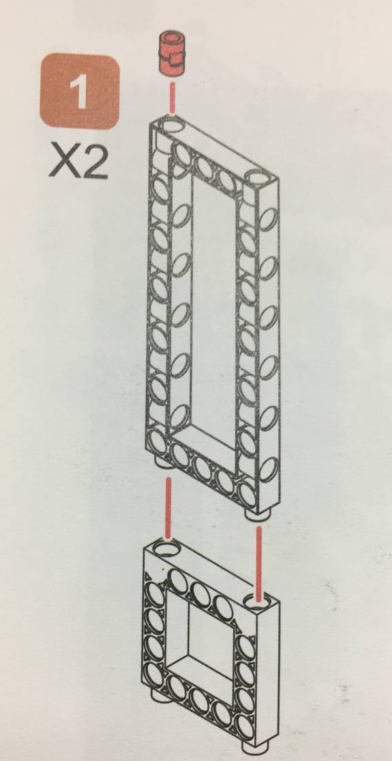
1、 将5*13孔超长方框插入5*5孔正方框,然后将C-长结合键插入5*13孔超长方框。此步骤需要操作两次。如图:
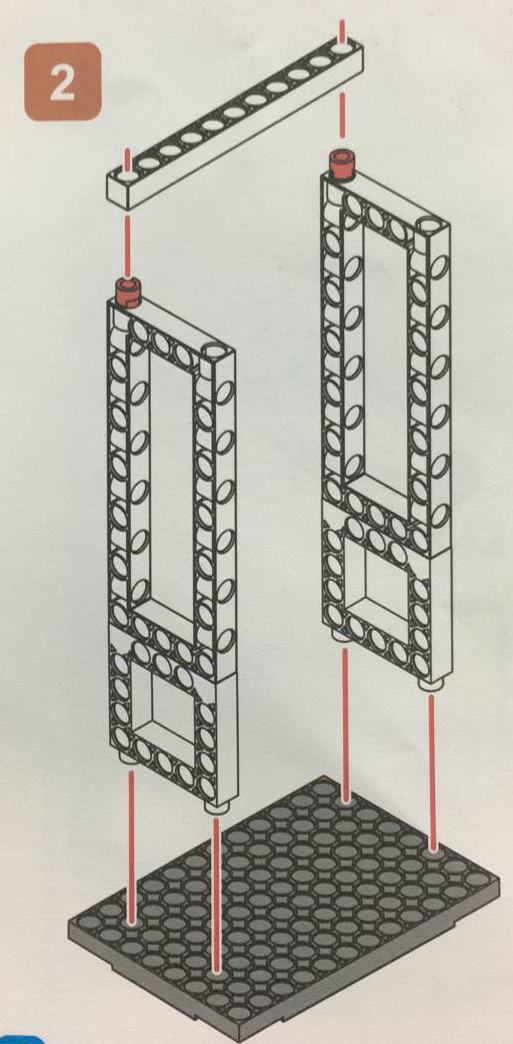
2、 将两个5*5孔正方框插入C-8*12底盘,将C-11孔长条通过2个C-长结合键,与两个5*13孔超长方框连接好。如图:
3、 使用4个B-短结合键,将两根C-15孔超长条与一个5*5孔正方框相连,然后将一个B-短结合键插入到5*5孔正方框上。如图:

4、 首先使用一个B-表情颗粒-春丽熊、B-3凹正方颗粒、B-动物耳朵、B-动物嘴颗粒、B-左手颗粒、B-右手颗粒和B-双足颗粒制作好完成的一个春丽熊,然后将春丽熊通过B-短结合键与5*5孔正方框连接好,然后将5*5孔正方框与另一个5*5孔正方框相连接。如图:

5、 将一个C-轴扣键插入C-3孔圆角长条中,然后将C-轴转接器插入到C-3孔圆角长条中。此步骤需要操作两次。如图:

6、 使用C-150mm l轴,分别穿过5*13孔超长方框、C-轴转接器、两根C-15孔超长条、C-轴转接器和5*13孔超长方框。如图:

7、 将C-150mm l轴插入C-10T链轮,然后将C-180度角度伺服马达插入到5*13孔超长方框上。如图:

8、 首先将C-轴转接器插入C-180度角度伺服马达,然后将C-27mm马达短轴上段的一段插入到C-轴转接器,然后将长的一段插入到C-30T链轮。如图:

9、 将38个C-链条连结在一起,然后套在C-30T链轮和C-10T链轮上。如图:

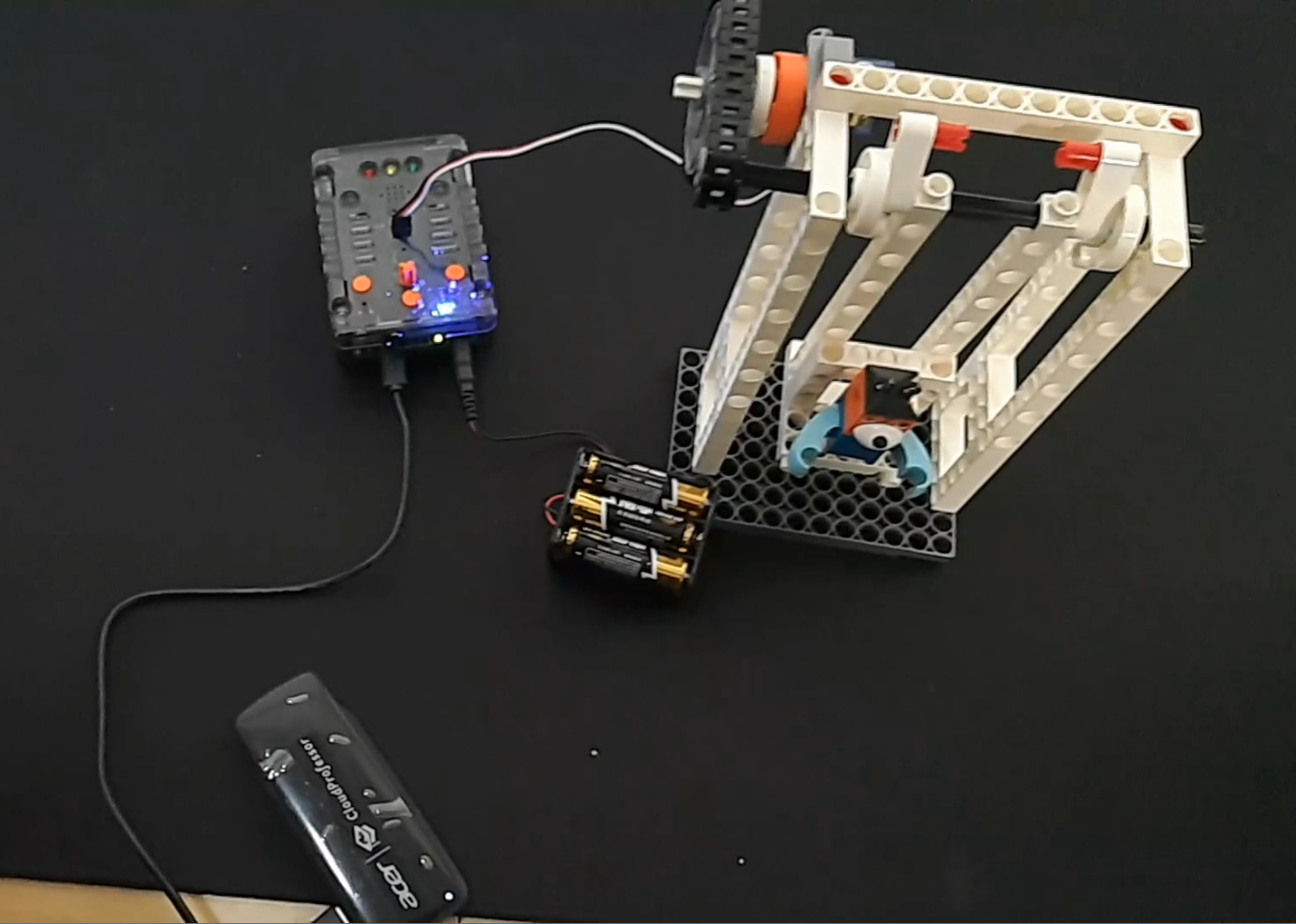
10、 将C-180度角度伺服马达连接到C-Arduino主控盒上的伺服马达D8接口,将云教授与C-Arduino主控盒上的Arduino MicroUSB接口相连,然后将3AA-6颗双层电池盒与C-Arduino主控盒上的Arduino主板电源孔相连。如图:

11、 最终效果,如图: