介绍说明
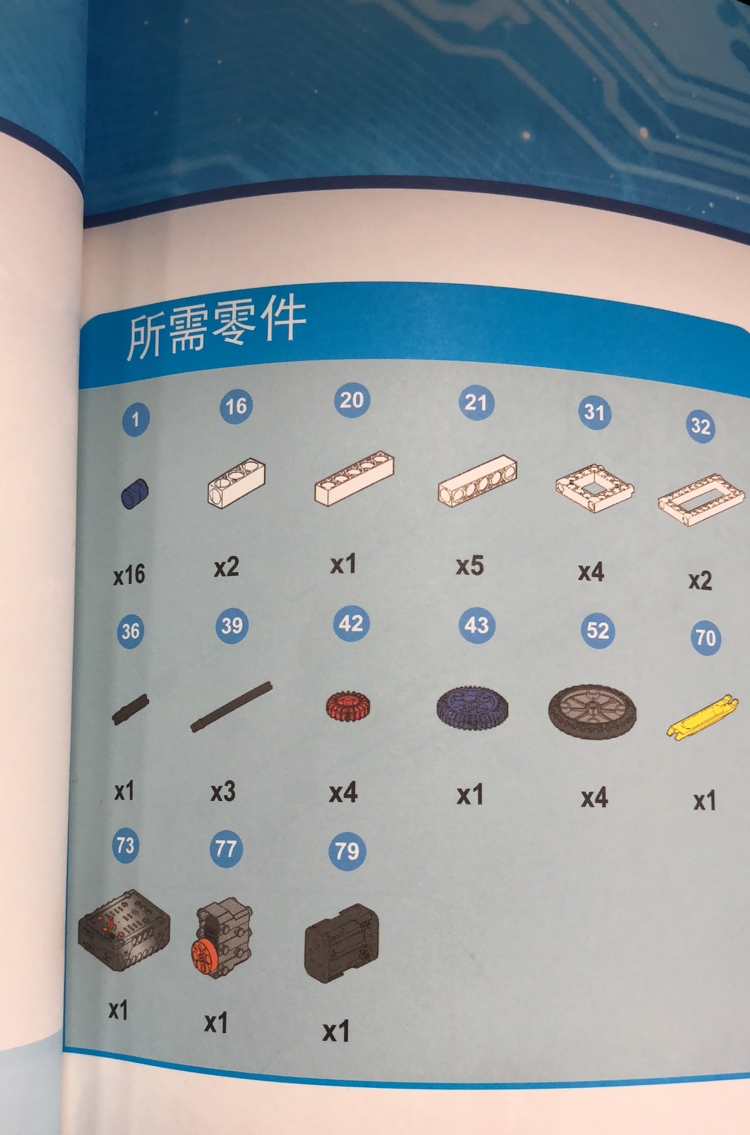
组装四轮传动车,首先准备所需零件,清单如下:
1号短结合键*16,16号3孔长条*2,20号5孔长条*1,21号5孔长条侧有空*5,31号5*5孔正方框*4,32号5*10孔长方框*2,36号35mmll轴*1,39号100mmll轴*3, 12号20T齿轮*4,43号40T齿轮*1,52号0D70*13mm橡胶轮*4,70号扳手*1,73号Arduino主控盒*1,77号连续伺服马达*1,79号6颗双层电池盒*1,如下图
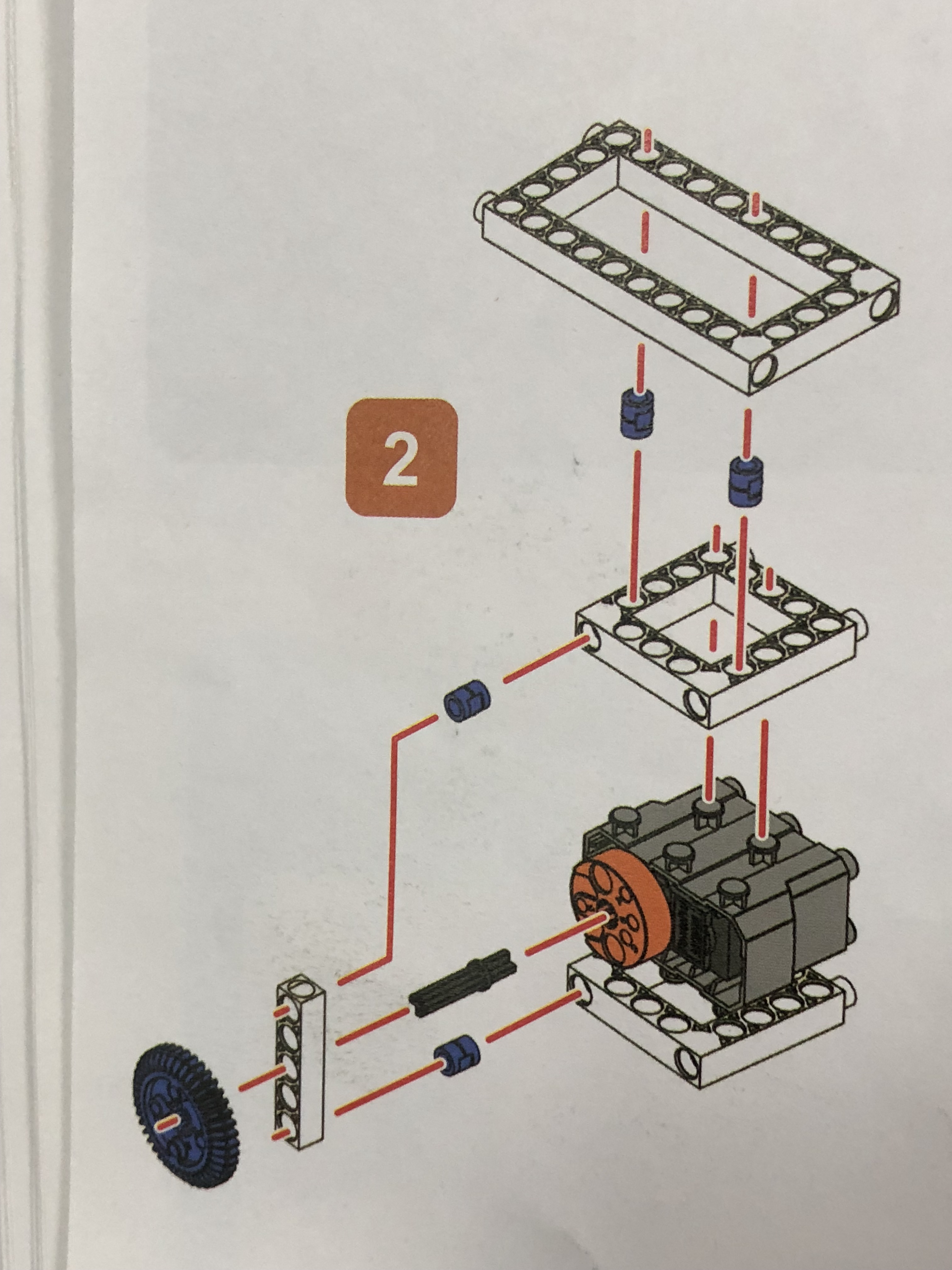
1.将连续伺服马达插入5*5孔正方框,如下图

2.使用短结合键将5*5孔正方框与5*10孔长方框连接起来,并插入连续伺服马达另一侧,将短结合键插入两个5*5孔正方框侧孔处;将35mmll轴插入连续伺服马达转轴中,穿入5孔长条并将40T齿轮插入,如下图
3. 将短结合键插入5*10孔长方框及侧边5*5孔正方框,再连接5孔长条侧有空后再插入短结合键,如图下

4.使用100mmll轴将20T齿轮和5*5孔正方框链接且插入之前短结合键中,100mmll轴另一侧连接0D70*13mm橡胶轮,如图下
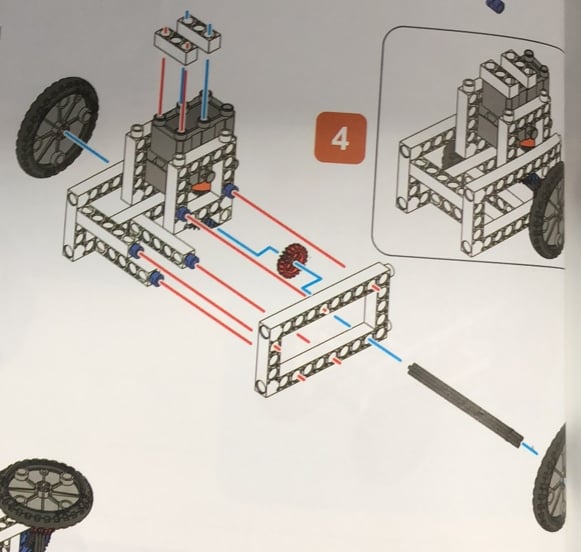
5.使用短结合键将5孔长条侧有空和5*5孔正方框拼接起来,后续插入5*10孔长方框顶孔处,如图下

6.使用100mmll轴穿插5孔长条,两端分别插入20T齿轮,如图下
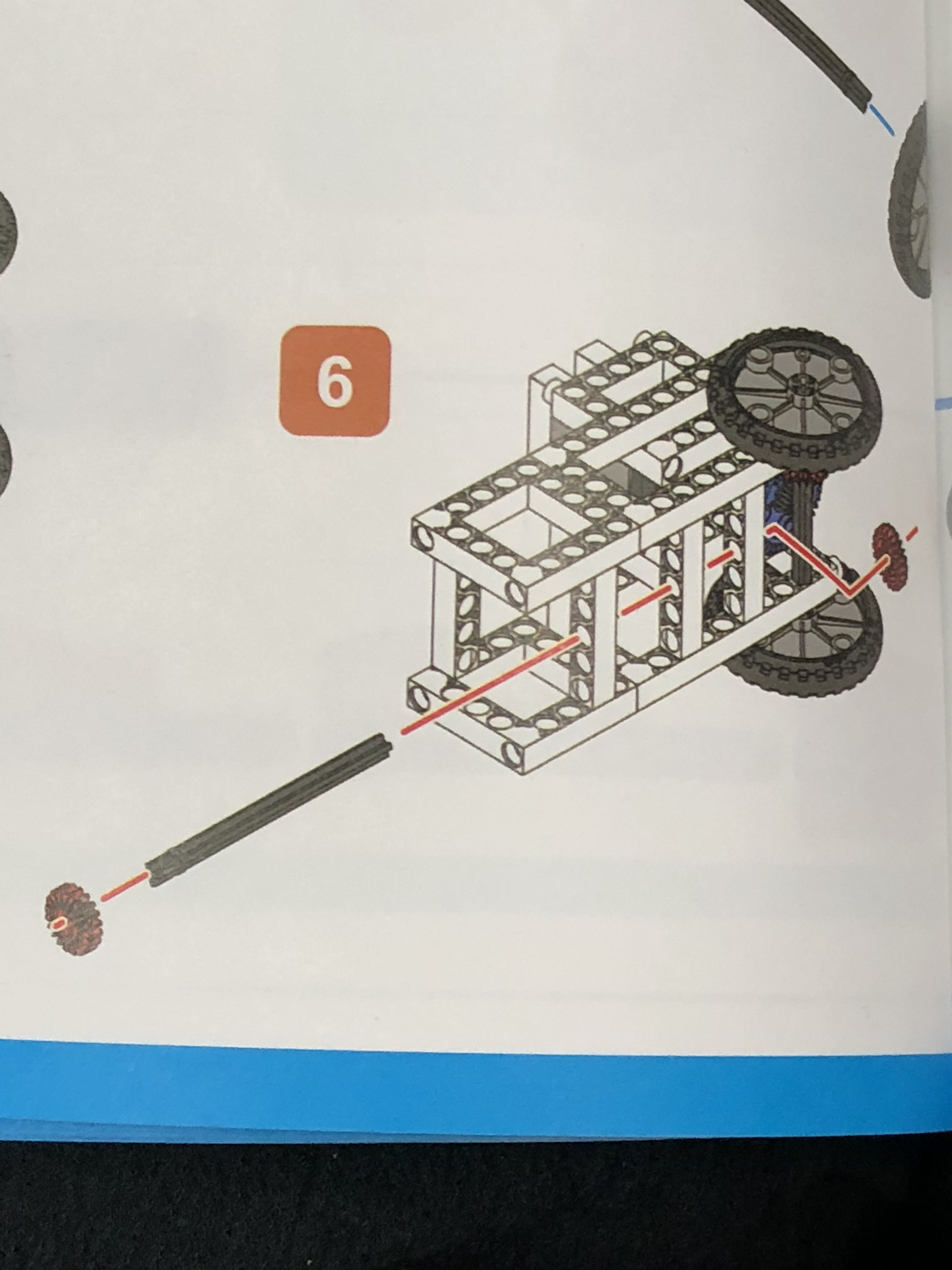
7.使用100mmll轴穿入一侧5*5孔正方框且插入20T齿轮穿过另一侧5*5孔正方框,且100mmll轴两端分别链接0D70*13mm橡胶轮,如下图

8.调整20T齿轮位置,如图下

9. 将6颗双层电池盒和Arduino主控盒放置车身顶部,如下图

10.将6颗双层电池盒供电连接线接至Arduino主控盒,连续伺服马达连接线接至Arduino主控盒,Arduino主控盒接入云教授,如图下

11.最终如图示


